Technische Daten Industrieroboter KUKA KR16/2
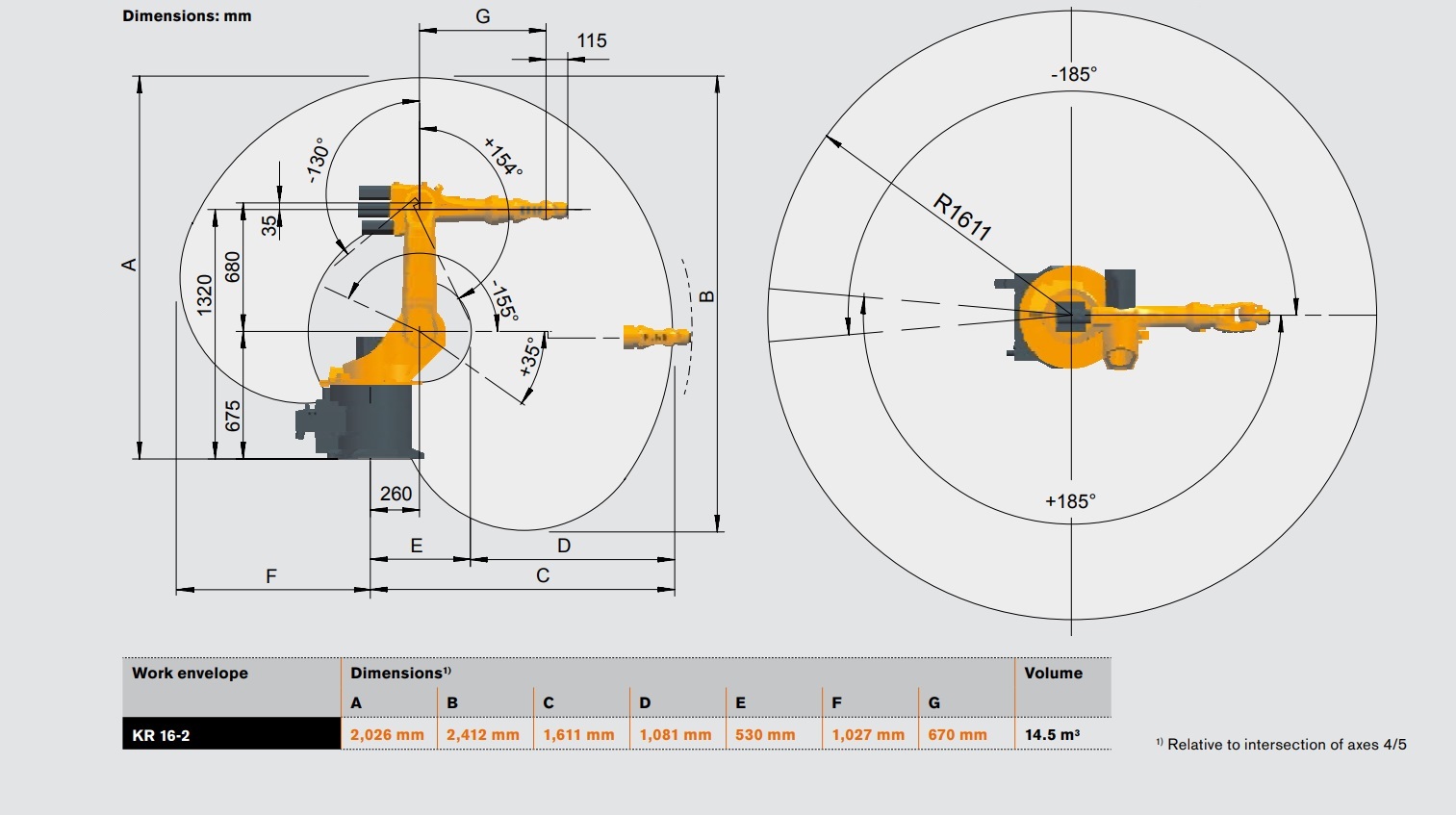
Roboter KUKA KR16/2
- 6-Achs-Industrieroboter
- 16 kg Flanschlast
- Arbeitsradius 1611 mm
- Schunk Handwechselflansch für verschiedene Werkzeuge
- vmax = 2 m/s
Drehtisch KUKA KP1-MD 250
- horizontale Rotation
- Tragfähigkeit 250 kg
- 1000 mm x 1000 mm T-Nuten Spannplatte
- vmax = 3,5 s/360°
Werkzeuge
- Frässpindel, nmax = 25000 min-1, drehzahlstellbar
- Heißdrahtschneiderahmen 1400 mm x 350 mm
- Greifer, 80 mm Weite
- Prägedorn, 200 mm Länge
Programmierung des Roboters
- parametrische Programmierung durch Rhino/Grashopper, KUKAprc
- 3D-Fräsprogrammierung durch RoboDK und Autodesk Fussion 360
Grundlegend unterscheiden wir die möglichen Fertigungsprozesse in die Bereiche
a) reine Konfektion (Zuschnitt, Bohren, Kontourfräsen, Trennen mittels Heißdraht)
b) Umformung (Prägen)
c) abtragende Formgebung (mehrachsiges Formfräsen, Heißdrahtschneiden)
d) additive Formgebung (3D-Drucken) – Granulatextruder ist derzeit noch nicht vorhanden, wird aber in Kürze zur Verfügung stehen.
Für die oben genannten Prozesse sind die folgenden Werkzeuge verfügbar, die zur Bearbeitung der unterschiedlichste Materialien (Holz/Kunststoffe/Aluminium/Styropor/ Textilien) und Arten von Halbzeugen (Platten/Bleche/Rohre/Blöcke) herangezogen werden können:
- Frässpindel (variable Drehzahl, verschiedene Fräsergeometrien und –größen)
- Heißdrahtschneider (140 x 30 cm)
- Pneumatischer Greifer für „pick&place“-Vorgänge
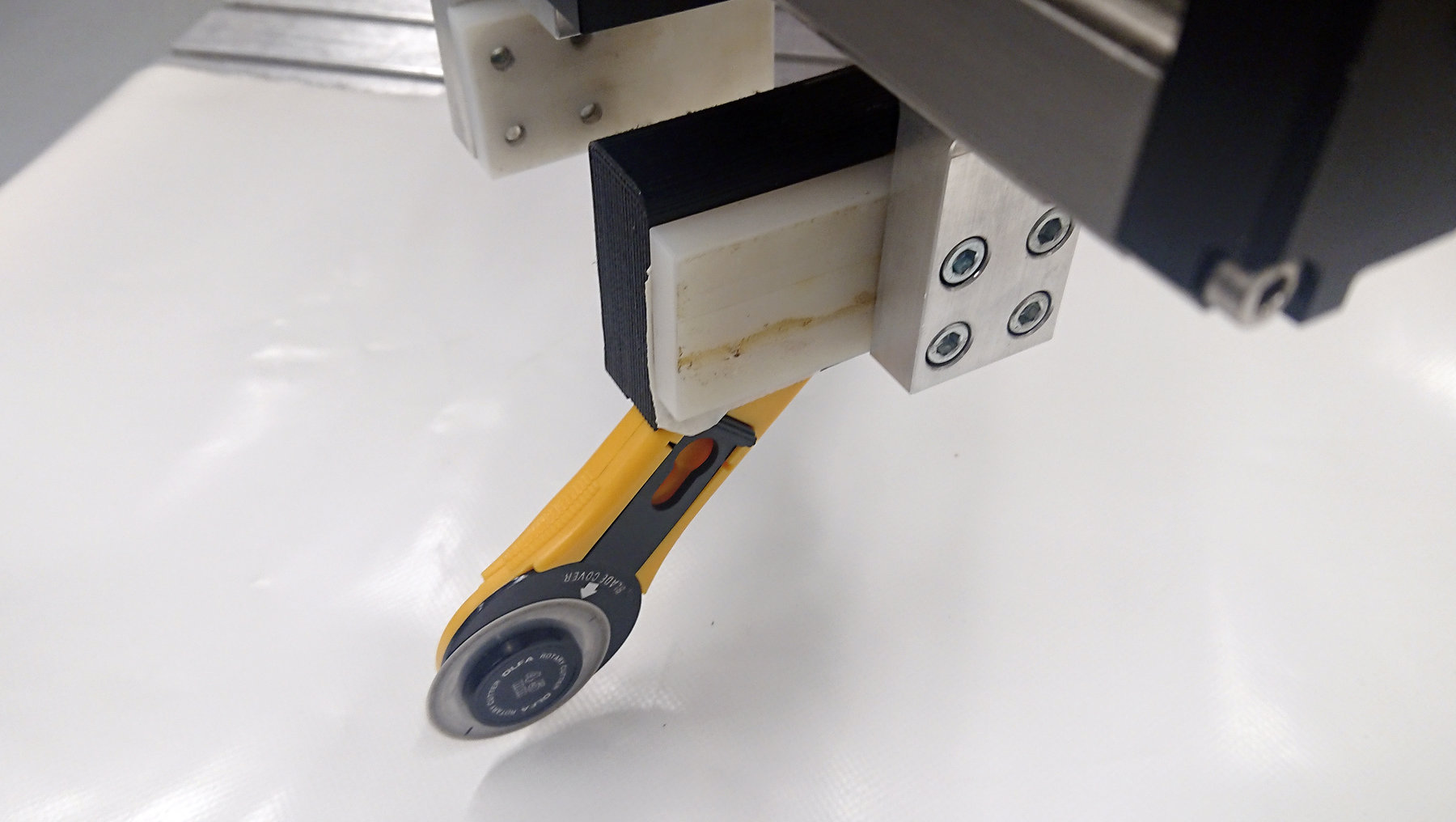
- Sowie „custom made“-Werkzeuge (z.B. Schneiden von Textilien, Prägen von Metallblechen, etc.)
-
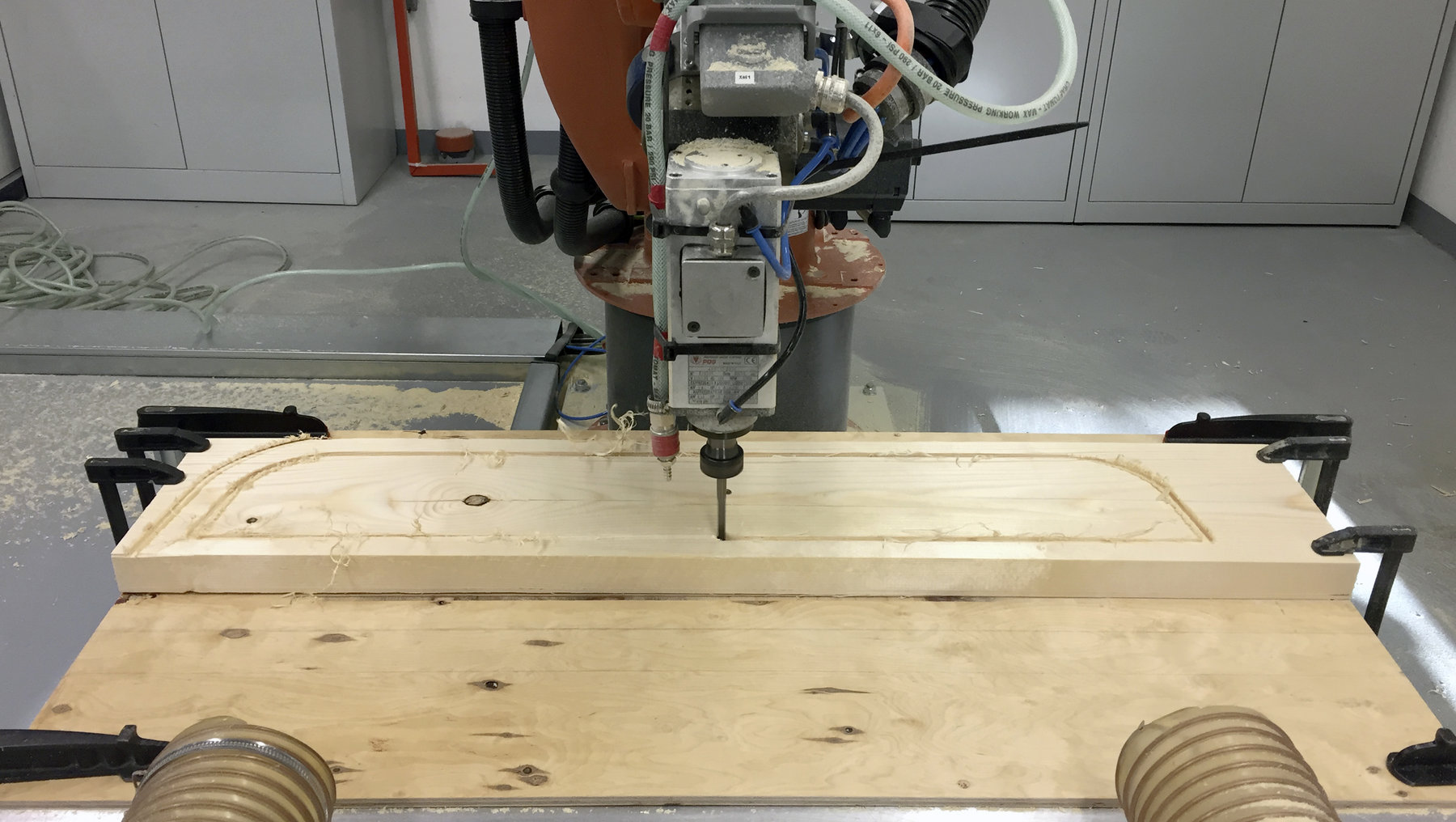
Frässpindel © HS Anhalt -

Heißdrahtschneider © HS Anhalt -
Pneumatischer Greifer © HS Anhalt -

Prägen von Metallblechen(custom made“-Werkzeuge) © HS Anhalt -

Extruder (Eigenbau) © HS Anhalt