Der Roboterhund – oder: Der beste Freund des Studierenden

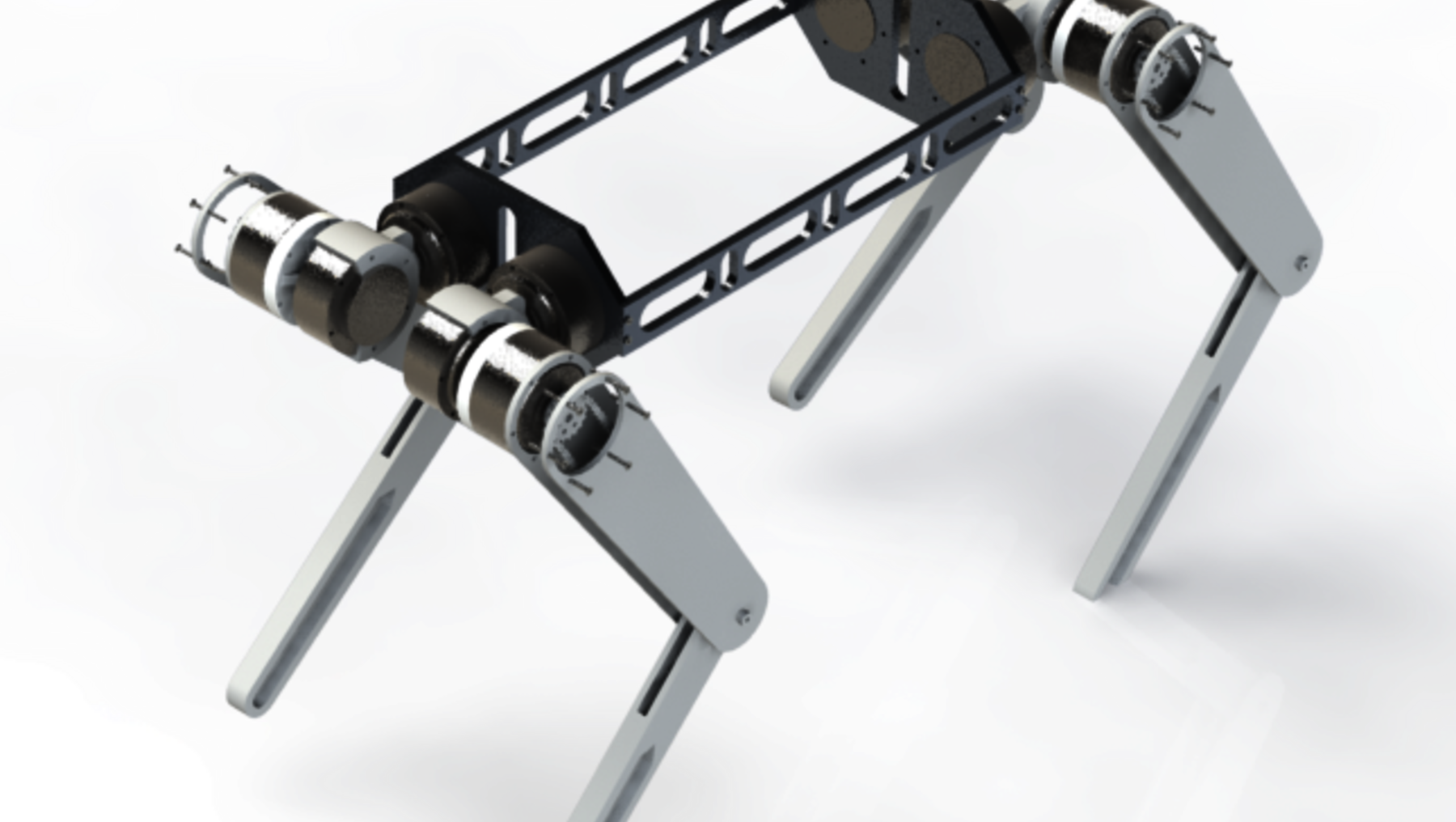
Ingenieur*innen wollen technische Lösungen entwickeln, die praktisch umgesetzt und dann auch genutzt werden - ganz in diesem Sinne entwickeln Studierende einen Roboter-Hund!
Unter der Federführung von Prof. Twieg tüftelt eine Reihe von Studierenden an einem gemeinsamen Projekt zur Entwicklung einer Roboter-Plattform für den Einsatz in Lehre und Forschung. Verschiedene Fragestellungen insbesondere der Robotik, aber auch aus angrenzenden Wissens- und Kompetenzbereichen (wie Automatisierung, Steuerungstechnik, Konstruktion und Programmierung) sollen anhand dessen bearbeitet und veranschaulicht werden. Zusammen haben die Studierenden überlegt, dass sich für ein solches, durchaus komplexes Unterfangen ein Roboterhund besonders gut eignen würde, weil er sehr vielseitig einsetzbar ist. So könnte er bei der Erfüllung von programmierten Aufträgen auch Hindernisse überwinden, an denen zum Beispiel ein radgetriebener Roboter scheitern würde. Für seine Fertigstellung ist direkt vor Ort am Campus alles für die Studierenden vorhanden, vom 3D-Drucker über die Elektronikwerkstatt bis hin zur Mechanischen Werkstatt.
Nach der Ideenfindung und Erstellung des Konzeptes für den Roboterhund ging es dann – ganz wie bei einem Forschungsprojekt – an die Aufteilung in Arbeitspakete. Verschiedene Studierende bearbeiten unterschiedliche Themen wie Konstruktion, Simulation, Steuerung, Sensorik und weitere.
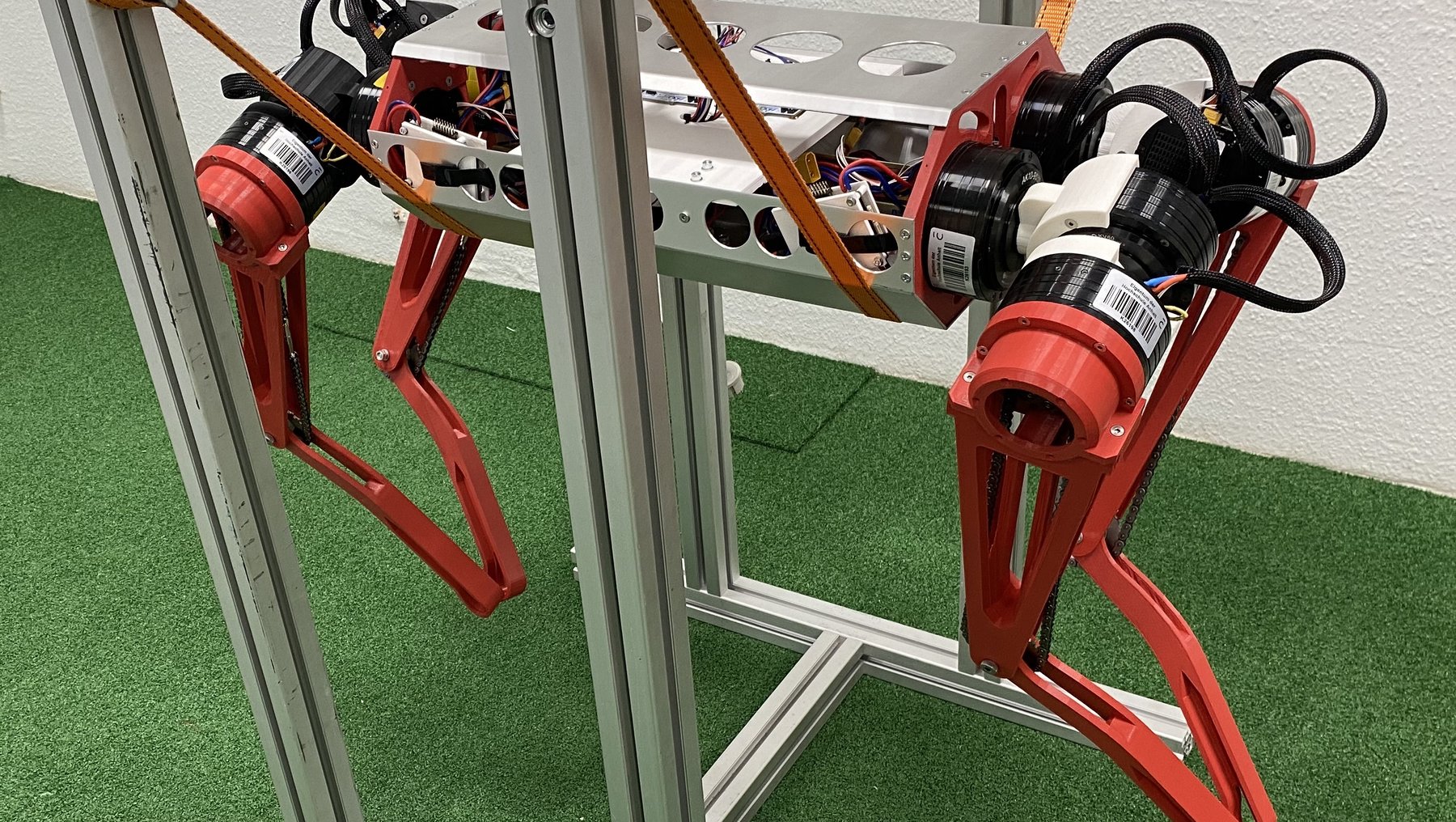
Der Student Dave Mangatter hat sich mit viel Engagement im Rahmen seiner Bachelorarbeit mit der Elektronik für den Roboterhund beschäftigt. Mit dem STM32 Nucleo Board als Lower-Level-Controller hat Herr Mangatter eine auf der Programmiersprache C basierende Firmware zur Steuerung der Motoren entwickelt. Pro Bein bekommt der Hund drei Servomotoren, die ihn letztendlich bewegungsfähig machen und über einen Higher-Level-Controller gesteuert werden. Die Kommunikation zwischen den einzelnen Komponenten des Elektroniksystems und den Motoren musste geplant, ausgelegt und über geeignete Bibliotheken und Kommunikationsprotokolle gewährleistet werden. Von der Spannungsquelle über das Kabelmanagement bis hin zur sinnvollen Implementierung der Hardware, einschließlich des Datenaustauschs zwischen den Komponenten, hat er Mangatter sämtliche Teile eigenständig ausgewählt, getestet und seine Planungen umgesetzt.
Nach dem erfolgreichen Abschluss seiner Bachelorarbeit setzt Herr Mangatter sein Studium im Masterstudiengang Elektro- und Informationstechnik fort.
Und auch für den Roboterhund geht es noch weiter: Studierende können innerhalb ihrer Projektmodule sowie im Rahmen ihrer Abschlussarbeiten daran arbeiten.
Und wenn der Roboterhund erst einmal fertig ist, lassen sich mit ihm diverse industrie- und wissenschaftsrelevante Anwendungen und Eignungsszenarien ableiten und untersuchen, zum Beispiel in den Bereichen Gesundheitsfürsorge, Exploration und kooperatives Arbeiten.
Betreuer/in
